Мы неизменно признаем, что технологии должны быть доступны для всех и навсегда, будь то нормальные люди или люди с особыми способностями. Основное преимущество инноваций состоит в том, чтобы привлекать людей и улучшать их, а не для того, чтобы побеждать их, а, скорее, чтобы помочь им.
Войти в текст
Люди с неспособностью говорить используют разные средства коммуникации для передачи своих сообщений. Самый распространенный из них - язык жестов. Язык жестов - это язык, в котором для передачи сообщения используется жестовая форма. Язык жестов распространен среди людей, которые не могут говорить или слушать. Итак, вот проект, который поможет вам перевести язык жестов в текст, понятный другим людям.
Как использовать Arduino для перевода подписи в текст?
Теперь перейдем к сбору дополнительных данных, их анализу, составлению схемы и записи кода на микроконтроллер.
Шаг 1. Предварительные требования
Перед тем как приступить к работе, лучше собрать и изучить аппарат, который мы собираемся использовать. В списке ниже показаны все элементы, которые нам нужны в этом проекте.
- Arduino UNO
- Провода перемычки папа / мама
- Резисторы (470 Ом)
- Макетная плата / Veroboard
- Женские заголовки
- Перчатка
Шаг 2: Настройка аппарата
Мы будем использовать сенсоры Flex для обнаружения жеста. Датчик изгиба - это датчик, который дает различное сопротивление и другой угол при каждом изгибе. Он имеет два контакта, которые соединены в конфигурации делителя напряжения. Подключение этих контактов к Arduino показано ниже.
Принципиальная электрическая схема
FLEX 1, FLEX 2, FLEX 3, FLEX 4, FLEX 5 - это датчики изгиба, а RES1, RES2, RES3, RES4, RES5 - резисторы на 470 Ом. Одна точка всех гибких датчиков общая и на нее подается 5В. На другом конце одна ножка всех резисторов является общей и заземлена. На вход контактов Arduino будут поступать аналоговые данные от 0 до 1023, которые будут преобразованы в цифровую форму в коде.
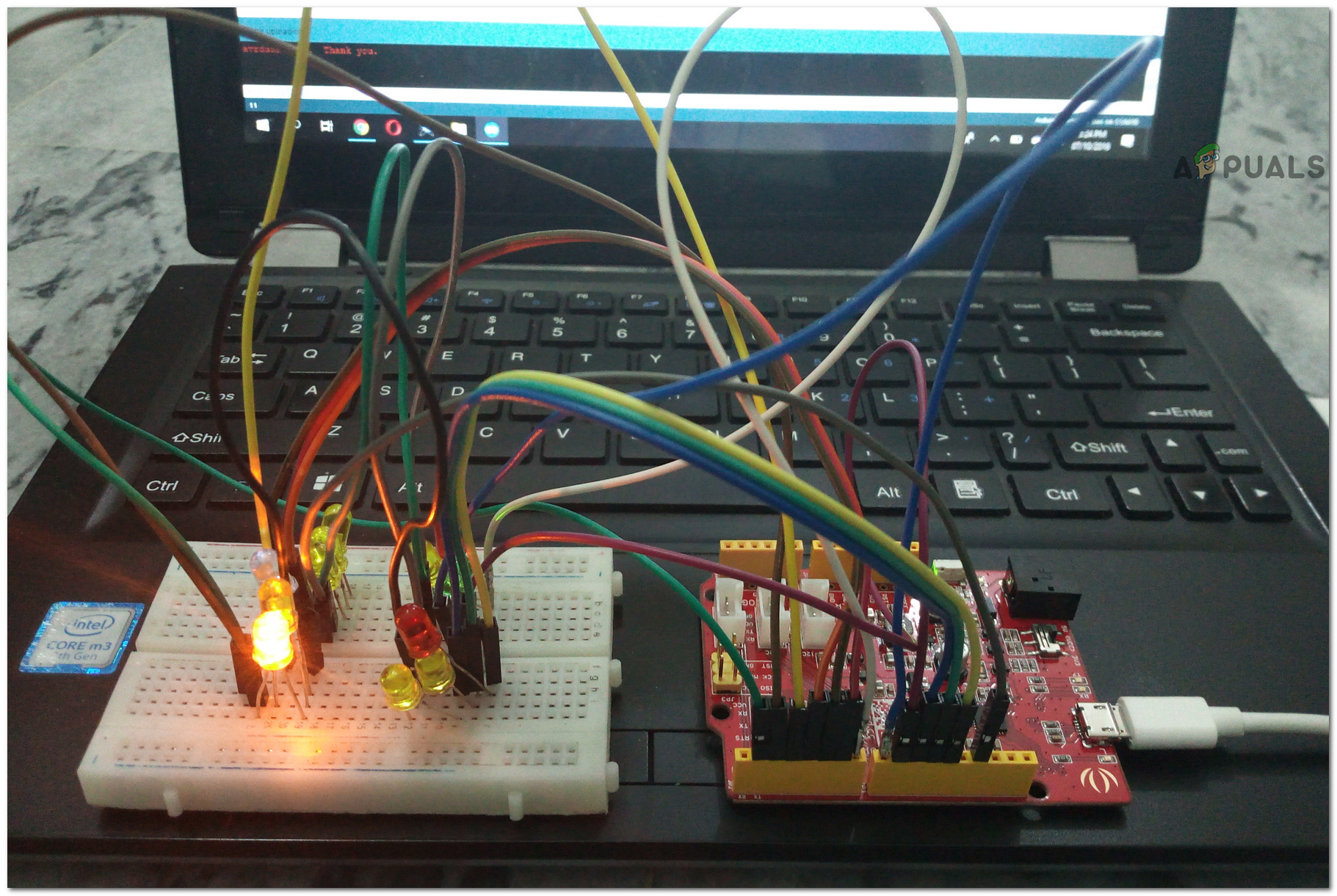
Теперь, когда мы знаем, как работает датчик изгиба, прикрепите каждый датчик изгиба к пальцам перчатки (избегайте использования клея). Припаяйте перемычки ко всем датчикам гибкости и подключите их к Veroboard, как показано на изображении выше. Тщательно спаяйте соединения и выполните проверку целостности. Если проверка целостности не удалась, еще раз проверьте паяные соединения и исправьте их.
Шаг 3. Начало работы с Arduino
Если у вас нет Arduino IDE, загрузите последнюю версию из Ардуино
- Подключите Arduino к компьютеру и перейдите в Панель управления> Оборудование и звук> Устройства и принтеры, чтобы проверить имя порта, к которому подключен Arduino. На моем ПК это COM14. На вашем ПК может быть иначе.
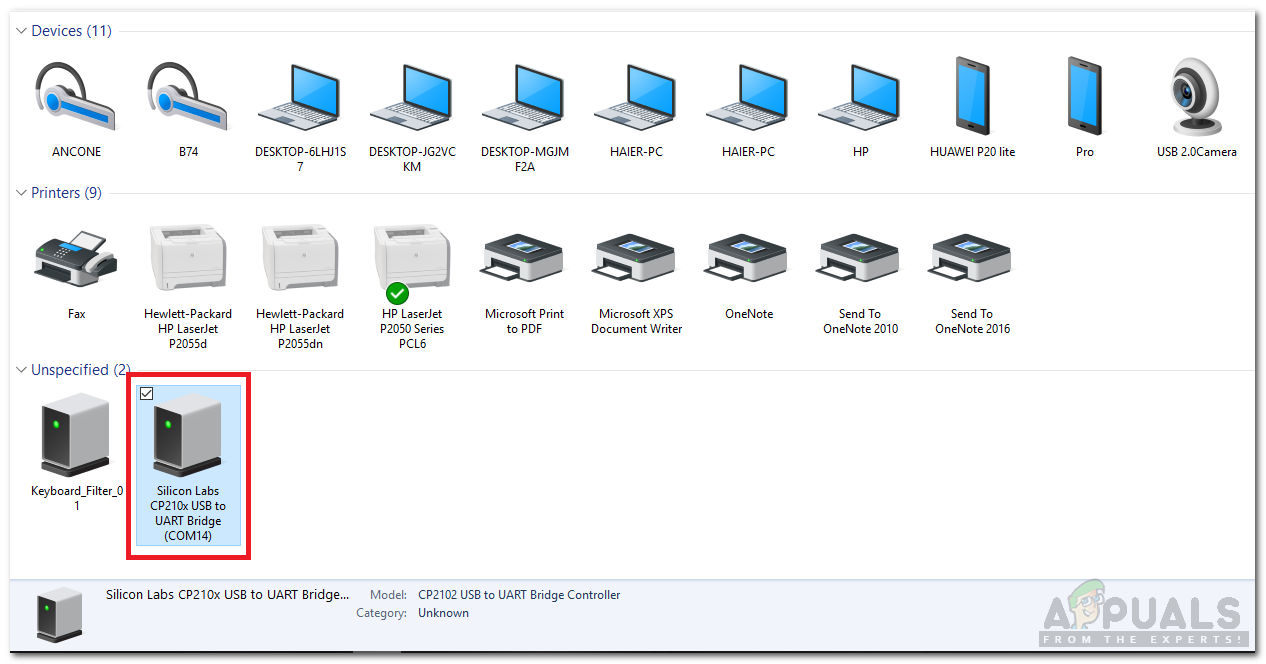
Поиск номера порта
- Откройте вашу Arduino IDE и установите плату на «Arduino / Genuino Uno».
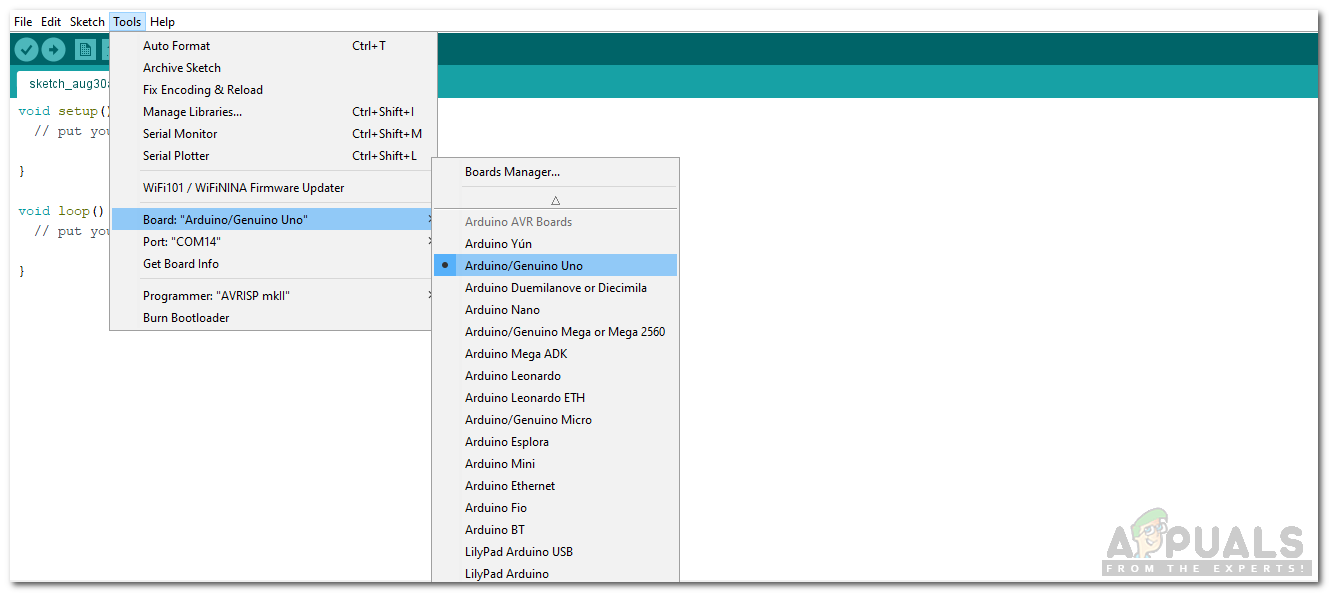
Доска настроек
- Откройте свою Arduino IDE и установите порт, который вы ранее наблюдали на своем ПК.
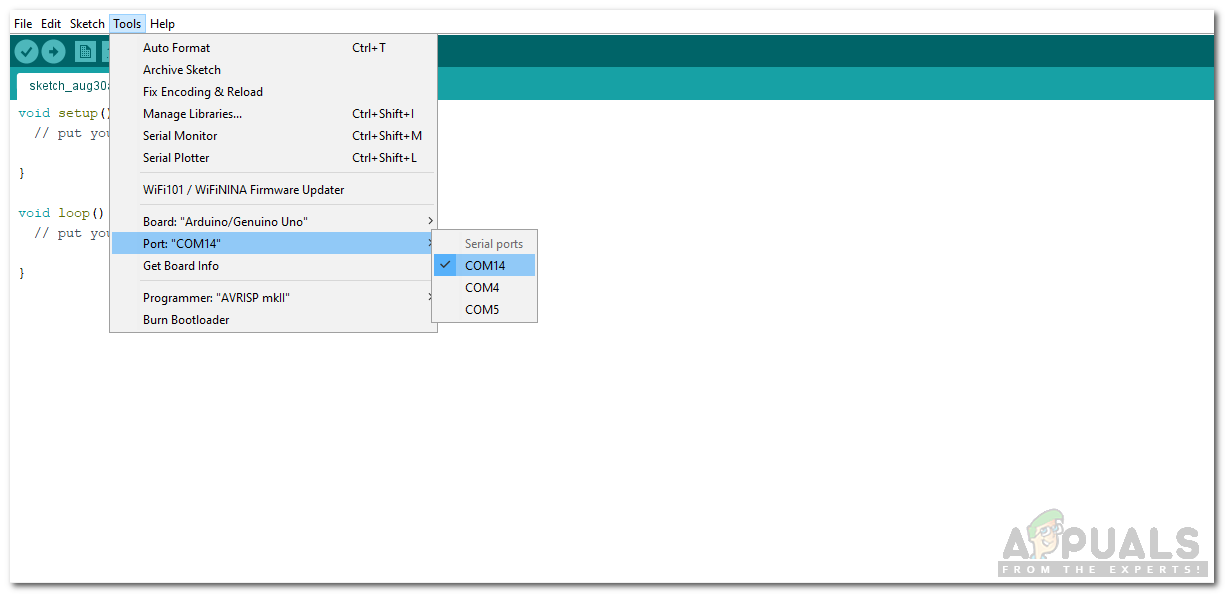
Настройка порта
- Теперь загрузите приведенный ниже код и загрузите его на свою плату Arduino, нажав кнопку «Загрузить».
Загрузить
Ссылка для скачивания: Кликните сюда
Шаг 4: Код
Код хорошо прокомментирован, но вот некоторые общие объяснения того, как он работает.
- В начале кода 5 аналоговых выводов Arduino инициализируются для использования с датчиками гибкости. Затем инициализируется Vcc от Arduino и сопротивление 4,7 кОм, которое используется в схеме. Затем инициализируются сопротивление датчика прямого изгиба и сопротивление под углом 90 градусов. Эти инициализации будут полезны при написании кода.
- установка void () - это функция, в которой мы инициализируем скорость передачи данных Arduino, и все пять аналоговых выводов инициализируются для использования в качестве INPUT. Скорость передачи - это скорость, с которой микроконтроллер обменивается данными.
- пустой цикл () это функция, которая выполняется непрерывно снова и снова в цикле. В этой функции все аналоговые значения считываются и преобразуются в цифровые значения. Затем рассчитывается сопротивление с использованием формулы делителя напряжения, и через это сопротивление вычисляется угол изгиба датчика изгиба.
После того, как вы поймете и загрузите код, наденьте перчатки и сделайте разные жесты, чтобы перевести их в текст. В коде вы можете добавить больше комбинаций движения пальца по вашему выбору и соответствующим образом отобразить сообщение. Вы увидите, что ваш язык жестов теперь преобразован в текст.
Шаг 5: Дополнительно
Этот проект посвящен преобразованию языка жестов в текст и отображению его на последовательном мониторе. Поскольку в качестве микроконтроллера используется Arduino, это устройство будет работать только тогда, когда Arduino подключен к ПК через кабель для передачи данных, поскольку Arduino не имеет встроенного модуля WiFi. Чтобы сделать этот проект более интересным, вы можете добавить внешний модуль WiFi или использовать модуль ESP вместо Arduino, избавиться от кабеля для передачи данных и наслаждаться переводом речи в речь через WiFi.